 임효인 기자
임효인 기자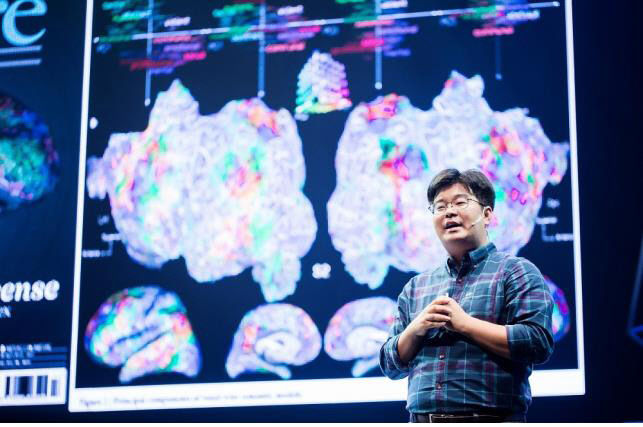 |
| KAIST는 뇌인지과학과 정재승 교수 연구팀이 인간 뇌 신호를 해독해 생각만으로 로봇 팔을 원하는 방향으로 제어하는 '뇌·기계 인터페이스 시스템'을 개발했다고 24일 밝혔다. /KAIST 제공 |
24일 KAIST에 따르면 뇌인지과학과 정재승 교수 연구팀은 서울대의대 신경외과 정천기 교수 연구팀과 공동연구를 통해 생각대로 기계를 움직이는 뇌-기계 인터페이스 시스템을 개발했다.
뇌-기계 인터페이스는 인간이 생각만으로 기계를 제어하는 기술이다. 팔이 절단되거나 팔에 장애가 있는 사람이 로봇 팔을 제어해 일상에서 필요한 팔 동작을 회복할 수 있는 보조기술이다.
연구팀은 뇌전증 화자를 대상으로 팔을 뻗는 동작을 상상할 때 관측되는 대뇌 피질 신호를 분석해 환자가 의도한 팔 움직임을 예측하는 '팔 동작·방향 상상 뇌 신호 디코팅 기술'을 개발했다. 이러한 디코딩 기술은 실제 움직임이나 복잡한 운동 상상이 필요하지 않기 때문에 운동장애를 겪는 화자가 장기간 훈련 없이도 자연스럽고 쉽게 로봇팔을 제어할 수 있다.
연구팀은 사용자의 자연스러운 팔 동작 상상을 공간해상도가 우수한 대뇌 피질 신호로 측정하고 변분 베이지안 최소제곱 기계학습 기법을 활용해 직접 측정이 어려운 팔 동작의 방향 정보를 계산할 수 있는 디코딩 기술을 처음으로 개발했다.
연구팀의 팔 동작 상상 신호 분석기술은 운동피질을 비롯해 특정 대뇌 영역에 국한되지 않아 사용자마다 다를 수 있는 상상 신호와 대뇌 영역 특성을 맞춤형으로 학습해 최적의 결과값을 출력할 수 있다. 연구팀은 대뇌 피질 신호 디코딩을 통해 환자가 상상한 팔 뻗기 방향을 80% 이상의 정확도로 예측할 수 있음을 확인했다. 또 앞으로 사지마비 환자를 비롯해 운동장애를 겪는 환자를 대상으로 로봇 팔을 제어할 수 있는 뇌-기계 인터페이스 정확도 향상과 효율성 개선에 나설 예정이다.
정재승 교수는 "장애인마다 다른 뇌 신호를 맞춤형으로 분석해 장기간 훈련을 받지 않더라도 로봇 팔을 제어할 수 있는 기술은 혁신적인 결과"라며 "이번 기술은 향후 의수를 대신할 로봇팔을 사용화 하는 데도 크게 기여할 것으로 기대된다"고 말했다. 임효인 기자
중도일보(www.joongdo.co.kr), 무단전재 및 수집, 재배포 금지

![[서천다문화] `젖어야 진짜 새해!`…한 번 가면 빠진다는 태국 송크란 축제](https://dn.joongdo.co.kr/mnt/webdata/content/2026y/05m/03d/crop118_2026041501001272200052081.jpg)









![[박현경골프아카데미]호구 안 당하고 싶다면 이렇게 하세요..현직 프로들이 말하는 OECD 극복하기](https://dn.joongdo.co.kr/mnt/images/webdata/content/2026y/05m/03d/20260428001759268_1.jpg)






